近日,我院医疗机器人与精密仪器实验室(杨润怀团队),在软体机器人领域著名学术期刊《Soft Robotics(柔性机器人)》(中科院一区)上发表题为《Untethered Soft Pneumatic Actuators with Embedded Multiple Sensing Capabilities(具备内置多参数传感能力的无约束气动柔性机器人)》的学术论文,以及在中科院一区期刊《Acta Biomaterialia(生物材料学报)》发表了题为《A multifunctional sensor for real-time monitoring and pro-healing of frostbite wounds(实时监测和冻伤治疗的多功能传感器)》的学术论文。两篇论文分别对软体机器人在执行器以及传感器领域进行了探索。我院硕士研究生方兴苗、汪健分别为两篇论文的第一作者,我院教师杨润怀、罗婷婷为论文的共通讯作者,我院为第一作者单位。
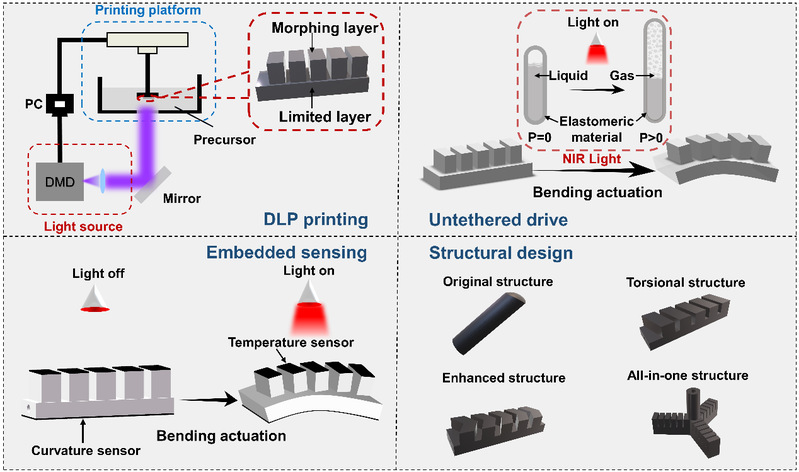
气动软体机器人因其自身的各种特点受到广泛关注,在医疗卫生领域具有很大的应用潜力。尽管最近对软体机器人的改进显示出精细操作的巨大潜力,但完全不受束缚的气动智能软机器人的开发仍然具有挑战性。本文介绍了一种嵌入式多传感功能的新型无束缚软气动执行器。软气动执行器的无绳驱动是通过近红外诱导的液气相变实现。此外,还开发了一种柔性导电树脂来制造柔性传感器,以实现软执行器的弯曲和温度传感。通过DLP 3D打印,实现软执行器和柔性传感器的快速制造。本文所提出的无束缚软执行器对完全无束缚智能软机器人研究提供了重要的参考价值。
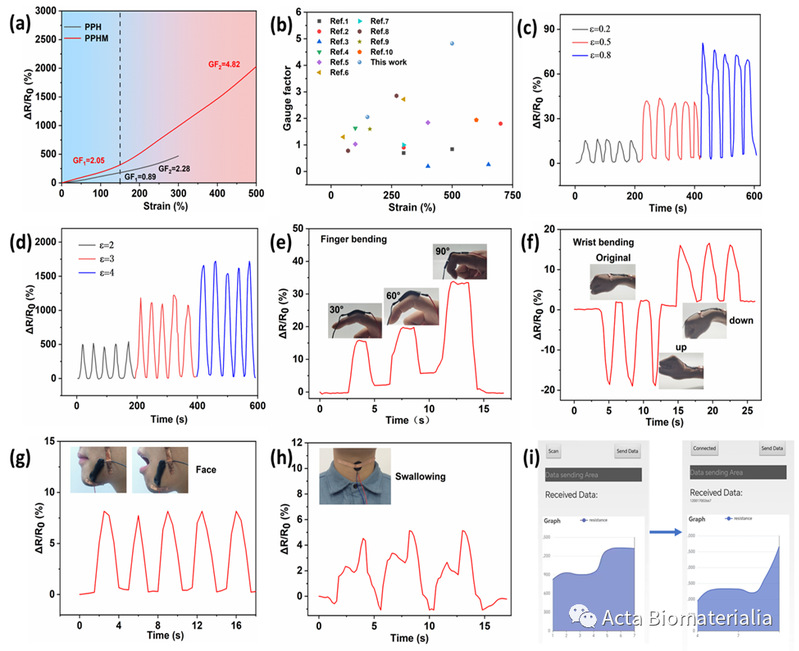
另一方面,软体结构在可穿戴传感器上有着很好的应用潜力,杨润怀团队开发了一款多功能PAAm/PEG/HK/MXene导电水凝胶传感器(PPHM水凝胶传感器),作为一种高性能治疗型一体化表皮传感器。这种传感器不仅能加速伤口愈合,还能提供可穿戴的人机交互功能。所开发的传感器具有高达500%的宽泛传感范围、高灵敏的传感特性(高应变时的量规因子=4.82)、最高可达600%的断裂伸长率、快速的自愈合能力、稳定的自粘能力、生物相容性、-20°C 的抗冻性以及可调节的光热转换能力。这种集治疗功能于一身的传感器可以灵敏地监测人体运动,检测微小的电生理信号,从而诊断相关活动和疾病。利用大鼠冻伤模型证明,复合水凝胶传感器可作为有效的伤口敷料,加速伤口愈合。导电水凝胶传感器的多功能应用与伤口诊断和治疗功能相结合,可满足伤口愈合和传感器监测的个性化医疗要求。综上,本研究旨在开发一种多功能水凝胶贴片。多功能水凝胶可组装成灵活且可穿戴的高性能诊断和治疗综合传感器,有效加速冻伤伤口的愈合,满足多种应用场景的实时监测。作者希望这项研究能为伤口治疗和传感器监测的整合提供参考。论文得到了Acta Biomaterialia期刊的优选公众号报道。
该项研究得到了国家自然科学基金面上项目、安徽省高校优秀青年科研项目、安徽省高校优秀人才支持计划等项目的资助。
论文 Soft Robotics连接:https://www.liebertpub.com/doi/10.1089/soro.2023.0048
论文Acta Biomaterialia 连接:https://www.sciencedirect.com/science/article/pii/S1742706123006037
